|
||
| Products Download Events Support Videos | ||

Technical Support
On-Line Manuals
RL-ARM User's Guide (MDK v4)
Getting Started
To run this RL-CAN TMPM36x example on a board, ensure you have:
- an MCBTMPM360 Evaluation board from Keil
- a ULINK® USB Interface Adapter from Keil
- a USB cable for 5 V power supply.
- Copy the example from \Keil\ARM\Boards\Keil\MCBTMPM360\RL\CAN\CAN_Ex1 or from \Keil\ARM\Boards\Keil\MCBTMPM360\RL\CAN\CAN_Ex2 to any directory you want to use.
-
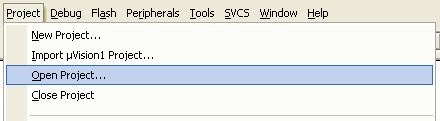
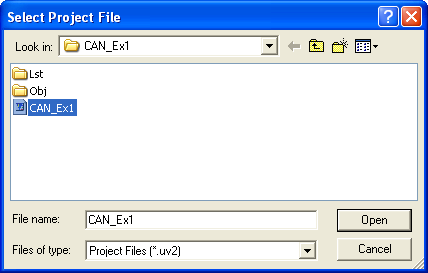
Load the project CAN_Ex1.uv2 or CAN_Ex2.uv2 file from the
copied directory into µVision® 4 IDE (Project —> Open
Project...)
-
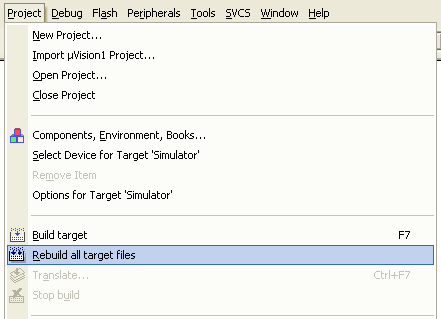
Rebuild the executable file from source files. Click on
Project —> Rebuild all target files on the menu or click
on the toolbar button .
-
Connect the ULINK device to the PC's USB port and to the Cortex
Debug Connector on the MCBTMPM360 board.
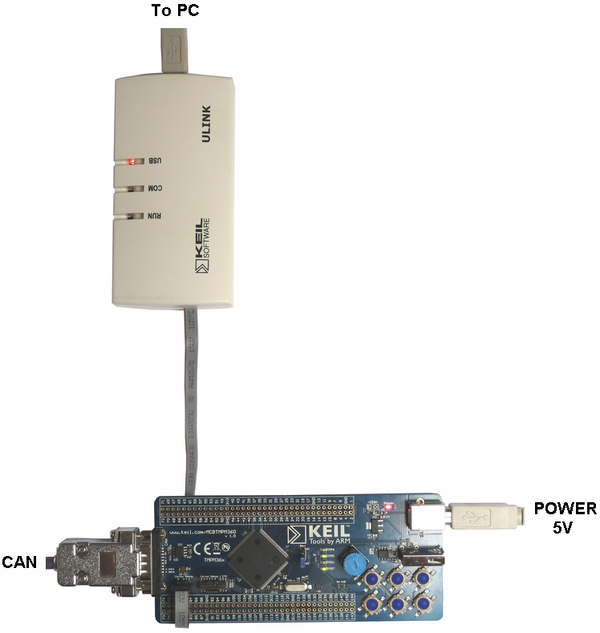
- Power-up the MCBTMPM360 board by connecting the board's USB power input to the PC's USB port.
-
Click on Flash —> Download on the menu to download
the executable file to the TMPM364 flash target on the MCBTMPM360
board.
- Press button PJ4 and keep it pressed while resetting the board (to enable loopback mode in which everything that is sent on CAN is also received).
- Rotate the potentiometer and watch the the state of the LEDs change according to the position of the potentiometer.
ProductsDevelopment Tools |
Hardware & Collateral |
Downloads |
Support |
Contact |