Implement application specific behavior of a Communication Device Class (CDC) USB Device using the sub-class Abstract Control Model (ACM).
More...
Implement application specific behavior of a Communication Device Class (CDC) USB Device using the sub-class Abstract Control Model (ACM).
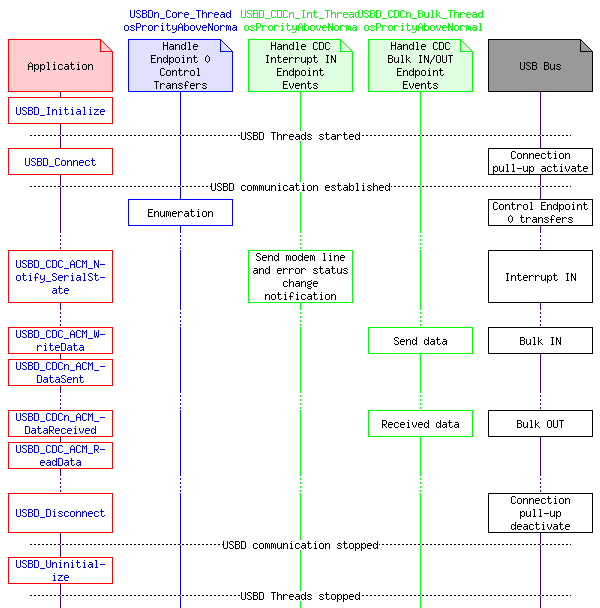
The CDC (ACM) class in the USB Component is used for data communication. You can typically use it in applications that previously used a serial COM or UART communication.
The USB Component allows multiple instances of the CDC class. This feature is used to create USB Composite Devices. Each CDC class instance has a separate files and interface functions:
The necessary descriptors are automatically generated by the USB Middleware Component. The page USB Descriptors provides more information on the topic.
The thread USBD_CDCn_Int_Thread handles Interrupt IN Endpoint whereas the USBD_CDCn_Bulk_Thread handles the Bulk IN and Bulk OUT Endpoints.
The following source code contains all the required callback functions and can be used to implement the application specific behavior of a USB CDC (ACM) Device.
The following source code contains all the required callback functions and can be used to implement the application specific behavior of a USB CDC (ACM) Device that can be used as a USB <-> UART bridge.
The following source code contains all the required callback functions and can be used to implement the application specific behavior of a USB CDC (ACM) Device that can be used for virtual Ethernet using the RNDIS protocol.
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
#include "rl_usb.h"
#include "Driver_ETH.h"
#include "Driver_ETH_MAC.h"
#include "Driver_ETH_PHY.h"
#include "USBD_Config_CDC_n.h"
#define RNDIS_MAC_ADDR "1E-30-6C-A2-45-5E"
#define RNDIS_MCAST_NUM 16
#define RNDIS_VENDOR_DESC "Keil NIC (USB <-> ETH)"
#define RNDIS_VENDOR_ID 0xFFFFFF
ARM_ETH_LINK_STATE RNDISn_GetLinkState (void);
int32_t RNDISn_SendFrame (const uint8_t *frame, uint32_t len);
int32_t RNDISn_ReadFrame ( uint8_t *frame, uint32_t len);
uint32_t RNDISn_GetRxFrameSize(void);
static void MAC_str_to_addr (const char *mac_str, uint8_t *mac_addr);
static void InitVars (void);
static void ResetVars (void);
static uint32_t rndis_state;
static ARM_ETH_LINK_STATE link_state;
static bool link_state_up;
static bool link_state_down;
static uint32_t packet_filter;
static ARM_ETH_MAC_ADDR mac_address;
static ARM_ETH_MAC_ADDR mcast_address[RNDIS_MCAST_NUM];
static uint32_t get_encapsulated_response_len;
static uint32_t get_encapsulated_response_buf[128/4];
static uint32_t xmit_ok;
static uint32_t rcv_ok;
static uint32_t xmit_error;
static uint32_t rcv_error;
static uint32_t rcv_no_buffer;
static uint32_t packet_in [(USBD_CDCn_ACM_SEND_BUF_SIZE +3)/4];
static uint32_t packet_out[(USBD_CDCn_ACM_RECEIVE_BUF_SIZE+3)/4];
static void MAC_str_to_addr (const char *mac_str, uint8_t *mac_addr) {
uint8_t c;
uint8_t n;
uint32_t i, j;
uint32_t str_len;
str_len = strlen(mac_str);
j = 0U;
for (i = 0U; i < str_len; i++) {
c = (uint8_t)mac_str[i];
if (c == '-') {
continue;
} else if ((c >= '0') && (c <= '9')) {
n = c - '0';
} else if ((c >= 'A') && (c <= 'F')) {
n = c - ('A' + 10U);
} else if ((c >= 'a') && (c <= 'f')) {
n = c - ('a' + 10U);
} else {
n = 0U;
}
if ((j & 1U) != 0U) {
mac_addr[j>>1] |= n;
} else {
mac_addr[j>>1] = (uint8_t)((uint32_t)n << 4);
}
j++;
}
}
static void InitVars (void) {
rndis_state = RNDIS_UNINITIALIZED;
link_state = ARM_ETH_LINK_DOWN;
packet_filter = 0U;
MAC_str_to_addr(RNDIS_MAC_ADDR, (uint8_t *)&mac_address);
memset((void *)mcast_address, 0, sizeof(mcast_address));
ResetVars();
}
static void ResetVars (void) {
link_state_up = false;
link_state_down = false;
get_encapsulated_response_len = 0U;
xmit_ok = 0U;
rcv_ok = 0U;
xmit_error = 0U;
rcv_error = 0U;
rcv_no_buffer = 0U;
}
InitVars();
}
InitVars();
}
InitVars();
}
const REMOTE_NDIS_INITIALIZE_MSG_t *ptr_init_msg;
REMOTE_NDIS_INITIALIZE_CMPLT_t *ptr_init_cmplt;
const REMOTE_NDIS_HALT_MSG_t *ptr_halt_msg;
const REMOTE_NDIS_QUERY_MSG_t *ptr_query_msg;
REMOTE_NDIS_QUERY_CMPLT_t *ptr_query_cmplt;
const REMOTE_NDIS_SET_MSG_t *ptr_set_msg;
REMOTE_NDIS_SET_CMPLT_t *ptr_set_cmplt;
const REMOTE_NDIS_RESET_MSG_t *ptr_reset_msg;
REMOTE_NDIS_RESET_CMPLT_t *ptr_reset_cmplt;
const REMOTE_NDIS_KEEPALIVE_MSG_t *ptr_keepalive_msg;
REMOTE_NDIS_KEEPALIVE_CMPLT_t *ptr_keepalive_cmplt;
uint32_t status, val;
uint32_t i;
uint32_t num, by;
uint16_t msg_type;
(void)len;
msg_type = __UNALIGNED_UINT16_READ(buf);
if ((rndis_state == RNDIS_UNINITIALIZED) &&
(msg_type != REMOTE_NDIS_INITIALIZE_MSG) &&
(msg_type != REMOTE_NDIS_HALT_MSG)) {
return false;
}
if (((uint32_t)buf & 3) != 0) {
return false;
}
status = RNDIS_STATUS_SUCCESS;
get_encapsulated_response_len = 0U;
switch (msg_type) {
case REMOTE_NDIS_INITIALIZE_MSG:
ptr_init_msg = (const REMOTE_NDIS_INITIALIZE_MSG_t *)((const void *)buf);
if (ptr_init_msg->MessageLength != sizeof(REMOTE_NDIS_INITIALIZE_MSG_t)) { return false; }
if (ptr_init_msg->MajorVersion != RNDIS_MAJOR_VERSION) { return false; }
if (ptr_init_msg->MinorVersion != RNDIS_MINOR_VERSION) { return false; }
if (ptr_init_msg->MaxTransferSize != 16384U) { return false; }
rndis_state = RNDIS_INITIALIZED;
ptr_init_cmplt = (REMOTE_NDIS_INITIALIZE_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_init_cmplt->MessageType = REMOTE_NDIS_INITIALIZE_CMPLT;
ptr_init_cmplt->MessageLength = sizeof(REMOTE_NDIS_INITIALIZE_CMPLT_t);
ptr_init_cmplt->RequestID = ptr_init_msg->RequestID;
ptr_init_cmplt->Status = status;
ptr_init_cmplt->MajorVersion = RNDIS_MAJOR_VERSION;
ptr_init_cmplt->MinorVersion = RNDIS_MINOR_VERSION;
ptr_init_cmplt->DeviceFlags = RNDIS_DF_CONNECTIONLESS;
ptr_init_cmplt->Medium = (uint32_t)NdisMedium802_3;
ptr_init_cmplt->MaxPacketsPerTransfer = 1U;
ptr_init_cmplt->MaxTransferSize = USBD_CDCn_ACM_RECEIVE_BUF_SIZE;
ptr_init_cmplt->PacketAlignmentFactor = 2U;
ptr_init_cmplt->Reserved[0] = 0U;
ptr_init_cmplt->Reserved[1] = 0U;
get_encapsulated_response_len = ptr_init_cmplt->MessageLength;
break;
case REMOTE_NDIS_HALT_MSG:
ptr_halt_msg = (const REMOTE_NDIS_HALT_MSG_t *)((const void *)buf);
if (ptr_halt_msg->MessageLength != sizeof(REMOTE_NDIS_HALT_MSG_t)) { return false; }
rndis_state = RNDIS_UNINITIALIZED;
return true;
case REMOTE_NDIS_QUERY_MSG:
ptr_query_msg = (const REMOTE_NDIS_QUERY_MSG_t *)((const void *)buf);
if (ptr_query_msg->MessageLength < 28U) { return false; }
ptr_query_cmplt = (REMOTE_NDIS_QUERY_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_query_cmplt->MessageType = REMOTE_NDIS_QUERY_CMPLT;
ptr_query_cmplt->RequestID = ptr_query_msg->RequestID;
ptr_query_cmplt->InformationBufferOffset = 16U;
switch (ptr_query_msg->Oid) {
case OID_GEN_SUPPORTED_LIST:
ptr_query_cmplt->InformationBufferLength = 23U * 4U;
ptr_query_cmplt->OIDInputBuffer[0] = OID_GEN_SUPPORTED_LIST;
ptr_query_cmplt->OIDInputBuffer[1] = OID_GEN_HARDWARE_STATUS;
ptr_query_cmplt->OIDInputBuffer[2] = OID_GEN_MEDIA_SUPPORTED;
ptr_query_cmplt->OIDInputBuffer[3] = OID_GEN_MEDIA_IN_USE;
ptr_query_cmplt->OIDInputBuffer[4] = OID_GEN_MAXIMUM_FRAME_SIZE;
ptr_query_cmplt->OIDInputBuffer[5] = OID_GEN_LINK_SPEED;
ptr_query_cmplt->OIDInputBuffer[6] = OID_GEN_TRANSMIT_BLOCK_SIZE;
ptr_query_cmplt->OIDInputBuffer[7] = OID_GEN_RECEIVE_BLOCK_SIZE;
ptr_query_cmplt->OIDInputBuffer[8] = OID_GEN_VENDOR_ID;
ptr_query_cmplt->OIDInputBuffer[9] = OID_GEN_VENDOR_DESCRIPTION;
ptr_query_cmplt->OIDInputBuffer[10] = OID_GEN_CURRENT_PACKET_FILTER;
ptr_query_cmplt->OIDInputBuffer[11] = OID_GEN_MAXIMUM_TOTAL_SIZE;
ptr_query_cmplt->OIDInputBuffer[12] = OID_GEN_MEDIA_CONNECT_STATUS;
ptr_query_cmplt->OIDInputBuffer[13] = OID_GEN_PHYSICAL_MEDIUM;
ptr_query_cmplt->OIDInputBuffer[14] = OID_GEN_XMIT_OK;
ptr_query_cmplt->OIDInputBuffer[15] = OID_GEN_RCV_OK;
ptr_query_cmplt->OIDInputBuffer[16] = OID_GEN_XMIT_ERROR;
ptr_query_cmplt->OIDInputBuffer[17] = OID_GEN_RCV_ERROR;
ptr_query_cmplt->OIDInputBuffer[18] = OID_GEN_RCV_NO_BUFFER;
ptr_query_cmplt->OIDInputBuffer[19] = OID_802_3_PERMANENT_ADDRESS;
ptr_query_cmplt->OIDInputBuffer[20] = OID_802_3_CURRENT_ADDRESS;
ptr_query_cmplt->OIDInputBuffer[21] = OID_802_3_MULTICAST_LIST;
ptr_query_cmplt->OIDInputBuffer[22] = OID_802_3_MAXIMUM_LIST_SIZE;
break;
case OID_GEN_HARDWARE_STATUS:
ptr_query_cmplt->InformationBufferLength = 4U;
if (link_state == ARM_ETH_LINK_UP) {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisHardwareStatusReady;
} else {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisHardwareStatusNotReady;
}
break;
case OID_GEN_MEDIA_SUPPORTED:
case OID_GEN_MEDIA_IN_USE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisMedium802_3;
break;
case OID_GEN_MAXIMUM_FRAME_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = ETH_MTU_SIZE;
break;
case OID_GEN_LINK_SPEED:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = 100000000U / 100U;
break;
case OID_GEN_TRANSMIT_BLOCK_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = USBD_CDCn_ACM_SEND_BUF_SIZE;
break;
case OID_GEN_RECEIVE_BLOCK_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = USBD_CDCn_ACM_RECEIVE_BUF_SIZE;
break;
case OID_GEN_VENDOR_ID:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = RNDIS_VENDOR_ID;
break;
case OID_GEN_VENDOR_DESCRIPTION:
ptr_query_cmplt->InformationBufferLength = strlen(RNDIS_VENDOR_DESC) + 1;
memset((void *)&ptr_query_cmplt->OIDInputBuffer[0], 0, ptr_query_cmplt->InformationBufferLength + 1U);
memcpy((void *)&ptr_query_cmplt->OIDInputBuffer[0], RNDIS_VENDOR_DESC, strlen(RNDIS_VENDOR_DESC));
break;
case OID_GEN_CURRENT_PACKET_FILTER:
ptr_query_cmplt->InformationBufferLength = 4U;
val = 0U;
if ((packet_filter & ARM_ETH_MAC_ADDRESS_MULTICAST) != 0U) { val |= RNDIS_FILTER_ALL_MULTICAST; }
if ((packet_filter & ARM_ETH_MAC_ADDRESS_BROADCAST) != 0U) { val |= RNDIS_FILTER_BROADCAST; }
if ((packet_filter & ARM_ETH_MAC_ADDRESS_ALL) != 0U) { val |= RNDIS_FILTER_PROMISCUOUS; }
ptr_query_cmplt->OIDInputBuffer[0] = val;
break;
case OID_GEN_MAXIMUM_TOTAL_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = 44U + ETH_MAX_SIZE;
break;
case OID_GEN_MEDIA_CONNECT_STATUS:
ptr_query_cmplt->InformationBufferLength = 4U;
if (link_state == ARM_ETH_LINK_UP) {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisMediaStateConnected;
} else {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisMediaStateDisconnected;
}
break;
case OID_GEN_PHYSICAL_MEDIUM:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisPhysicalMediumUnspecified;
break;
case OID_GEN_XMIT_OK:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = xmit_ok;
break;
case OID_GEN_RCV_OK:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = rcv_ok;
break;
case OID_GEN_XMIT_ERROR:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = xmit_error;
break;
case OID_GEN_RCV_ERROR:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = rcv_error;
break;
case OID_GEN_RCV_NO_BUFFER:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = rcv_no_buffer;
break;
case OID_802_3_PERMANENT_ADDRESS:
case OID_802_3_CURRENT_ADDRESS:
ptr_query_cmplt->InformationBufferLength = 6U;
memcpy((void *)&ptr_query_cmplt->OIDInputBuffer[0], &mac_address, sizeof(ARM_ETH_MAC_ADDR));
break;
case OID_802_3_MULTICAST_LIST:
for (i = 0U; i < RNDIS_MCAST_NUM; i++) {
if ((__UNALIGNED_UINT32_READ(&mcast_address[0]) == 0U) &&
(__UNALIGNED_UINT16_READ(&mcast_address[4]) == 0U)) {
break;
}
}
if (i == 0U) {
num = 0U;
ptr_query_cmplt->InformationBufferOffset = 0U;
} else {
num = i;
if (i < RNDIS_MCAST_NUM) {
num = i + 1U;
} else {
num = i;
}
memcpy((void *)&ptr_query_cmplt->OIDInputBuffer[0], mcast_address, num * sizeof(ARM_ETH_MAC_ADDR));
}
ptr_query_cmplt->InformationBufferLength = num * sizeof(ARM_ETH_MAC_ADDR);
break;
case OID_802_3_MAXIMUM_LIST_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = RNDIS_MCAST_NUM;
break;
default:
ptr_query_cmplt->InformationBufferOffset = 0U;
ptr_query_cmplt->InformationBufferLength = 0U;
status = RNDIS_STATUS_NOT_SUPPORTED;
break;
}
ptr_query_cmplt->Status = status;
ptr_query_cmplt->MessageLength = ptr_query_cmplt->InformationBufferLength + 24U;
get_encapsulated_response_len = ptr_query_cmplt->MessageLength;
break;
case REMOTE_NDIS_SET_MSG:
ptr_set_msg = (const REMOTE_NDIS_SET_MSG_t *)((const void *)buf);
if (ptr_set_msg->MessageLength < 28U) { return false; }
ptr_set_cmplt = (REMOTE_NDIS_SET_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_set_cmplt->MessageType = REMOTE_NDIS_SET_CMPLT;
ptr_set_cmplt->MessageLength = sizeof(REMOTE_NDIS_SET_CMPLT_t);
ptr_set_cmplt->RequestID = ptr_set_msg->RequestID;
switch (ptr_set_msg->Oid) {
case OID_802_3_MULTICAST_LIST:
by = ptr_set_msg->InformationBufferLength;
if (by > (sizeof(ARM_ETH_MAC_ADDR) * RNDIS_MCAST_NUM)) {
by = sizeof(ARM_ETH_MAC_ADDR) * RNDIS_MCAST_NUM;
}
if (by > 0U) {
memcpy(mcast_address, (const void *)&ptr_set_msg->OIDInputBuffer[0], by);
}
break;
case OID_GEN_CURRENT_PACKET_FILTER:
if ((ptr_set_msg->InformationBufferLength == 4U) &&
(ptr_set_msg->InformationBufferOffset != 0U)) {
val = __UNALIGNED_UINT32_READ(((const uint8_t *)&ptr_set_msg->RequestID) + ptr_set_msg->InformationBufferOffset);
if (val != 0U) {
if ((val & RNDIS_FILTER_ALL_MULTICAST) != 0U) { packet_filter |= ARM_ETH_MAC_ADDRESS_MULTICAST; }
if ((val & RNDIS_FILTER_BROADCAST) != 0U) { packet_filter |= ARM_ETH_MAC_ADDRESS_BROADCAST; }
if ((val & RNDIS_FILTER_PROMISCUOUS) != 0U) { packet_filter |= ARM_ETH_MAC_ADDRESS_ALL; }
if (link_state == ARM_ETH_LINK_DOWN) {
link_state = ARM_ETH_LINK_UP;
link_state_up = true;
}
rndis_state = RNDIS_DATA_INITIALIZED;
} else {
if (rndis_state == RNDIS_DATA_INITIALIZED) {
rndis_state = RNDIS_INITIALIZED;
}
}
} else {
status = RNDIS_STATUS_FAILURE;
}
break;
default:
status = RNDIS_STATUS_NOT_SUPPORTED;
break;
}
ptr_set_cmplt->Status = status;
get_encapsulated_response_len = ptr_set_cmplt->MessageLength;
break;
case REMOTE_NDIS_RESET_MSG:
ptr_reset_msg = (const REMOTE_NDIS_RESET_MSG_t *)((const void *)buf);
if (ptr_reset_msg->MessageLength != sizeof(REMOTE_NDIS_RESET_MSG_t)) { return false; }
ResetVars();
ptr_reset_cmplt = (REMOTE_NDIS_RESET_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_reset_cmplt->MessageType = REMOTE_NDIS_RESET_CMPLT;
ptr_reset_cmplt->MessageLength = sizeof(REMOTE_NDIS_RESET_CMPLT_t);
ptr_reset_cmplt->Status = status;
ptr_reset_cmplt->AddressingReset = 0U;
get_encapsulated_response_len = ptr_reset_cmplt->MessageLength;
break;
case REMOTE_NDIS_KEEPALIVE_MSG:
ptr_keepalive_msg = (const REMOTE_NDIS_KEEPALIVE_MSG_t *)((const void *)buf);
if (ptr_keepalive_msg->MessageLength != sizeof(REMOTE_NDIS_KEEPALIVE_MSG_t)) { return false; }
ptr_keepalive_cmplt = (REMOTE_NDIS_KEEPALIVE_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_keepalive_cmplt->MessageType = REMOTE_NDIS_KEEPALIVE_CMPLT;
ptr_keepalive_cmplt->MessageLength = sizeof(REMOTE_NDIS_KEEPALIVE_CMPLT_t);
ptr_keepalive_cmplt->RequestID = ptr_keepalive_msg->RequestID;
ptr_keepalive_cmplt->Status = status;
get_encapsulated_response_len = ptr_keepalive_cmplt->MessageLength;
break;
default:
return false;
}
if (get_encapsulated_response_len != 0U) {
}
return true;
}
REMOTE_NDIS_INDICATE_STATUS_MSG_t *ptr_indicate_status_msg;
uint32_t status;
(void)max_len;
if (link_state_up || link_state_down) {
if (link_state_up) {
status = RNDIS_STATUS_MEDIA_CONNECT;
} else {
status = RNDIS_STATUS_MEDIA_DISCONNECT;
}
ptr_indicate_status_msg = (REMOTE_NDIS_INDICATE_STATUS_MSG_t *)((void *)get_encapsulated_response_buf);
ptr_indicate_status_msg->MessageType = REMOTE_NDIS_INDICATE_STATUS_MSG;
ptr_indicate_status_msg->MessageLength = 20U;
ptr_indicate_status_msg->Status = status;
ptr_indicate_status_msg->StatusBufferLength = 0U;
ptr_indicate_status_msg->StatusBufferOffset = 0U;
get_encapsulated_response_len = 20U;
link_state_up = false;
link_state_down = false;
}
if (get_encapsulated_response_len != 0U) {
*buf = (uint8_t *)get_encapsulated_response_buf;
*len = (uint16_t) get_encapsulated_response_len;
get_encapsulated_response_len = 0U;
}
return true;
}
}
(void)len;
}
ARM_ETH_LINK_STATE RNDISn_GetLinkState (void) {
if (rndis_state == RNDIS_DATA_INITIALIZED) {
return ARM_ETH_LINK_UP;
}
return ARM_ETH_LINK_DOWN;
}
int32_t RNDISn_SendFrame (const uint8_t *frame, uint32_t len) {
REMOTE_NDIS_PACKET_MSG_t *ptr_packet_msg;
int32_t usb_cdc_acm_status;
ptr_packet_msg = (REMOTE_NDIS_PACKET_MSG_t *)((void *)packet_in);
if ((rndis_state == RNDIS_DATA_INITIALIZED) &&
(len >= ETH_MIN_SIZE) &&
(len <= ETH_MAX_SIZE)) {
memcpy((void *)&ptr_packet_msg->PayLoad[0], frame, len);
ptr_packet_msg->MessageType = REMOTE_NDIS_PACKET_MSG;
ptr_packet_msg->MessageLength = len + 44U;
ptr_packet_msg->DataOffset = 36U;
ptr_packet_msg->DataLength = len;
ptr_packet_msg->OutOfBandDataOffset = 0U;
ptr_packet_msg->OutOfBandDataLength = 0U;
ptr_packet_msg->NumOutOfBandDataElements = 0U;
ptr_packet_msg->PerPacketInfoOffset = 0U;
ptr_packet_msg->PerPacketInfoLength = 0U;
ptr_packet_msg->Reserved[0] = 0U;
ptr_packet_msg->Reserved[1] = 0U;
usb_cdc_acm_status =
USBD_CDC_ACM_WriteData (n, (
const uint8_t *)ptr_packet_msg, (int32_t)ptr_packet_msg->MessageLength);
if (usb_cdc_acm_status == (int32_t)ptr_packet_msg->MessageLength) {
rcv_ok++;
return ARM_DRIVER_OK;
}
if (usb_cdc_acm_status < 0) {
rcv_error++;
return ARM_DRIVER_ERROR;
}
if (usb_cdc_acm_status == 0) {
return ARM_DRIVER_ERROR_BUSY;
}
}
return ARM_DRIVER_ERROR;
}
int32_t RNDISn_ReadFrame (uint8_t *frame, uint32_t len) {
REMOTE_NDIS_PACKET_MSG_t *ptr_packet_msg;
uint32_t data_len;
int32_t usb_cdc_acm_status;
ptr_packet_msg = (REMOTE_NDIS_PACKET_MSG_t *)((void *)packet_out);
if ((rndis_state == RNDIS_DATA_INITIALIZED) &&
(len >= ETH_MIN_SIZE) &&
(len <= ETH_MAX_SIZE)) {
usb_cdc_acm_status =
USBD_CDC_ACM_ReadData (n, (uint8_t *)ptr_packet_msg, USBD_CDCn_ACM_RECEIVE_BUF_SIZE);
if ((usb_cdc_acm_status != 0) && (usb_cdc_acm_status == (int32_t)ptr_packet_msg->MessageLength)) {
data_len = len;
if (data_len > ptr_packet_msg->DataLength) {
data_len = ptr_packet_msg->DataLength;
}
memcpy(frame, (const void *)&ptr_packet_msg->PayLoad[0], data_len);
xmit_ok++;
return (int32_t)data_len;
}
if (usb_cdc_acm_status < 0) {
xmit_error++;
return ARM_DRIVER_ERROR;
}
if (usb_cdc_acm_status == 0) {
return ARM_DRIVER_ERROR_BUSY;
}
}
return 0;
}
uint32_t RNDISn_GetRxFrameSize (void) {
uint32_t avail_data_len;
if (avail_data_len > 44U) {
avail_data_len -= 44U;
}
return avail_data_len;
}
The following source code contains all the required callback functions and can be used to implement the application specific behavior of a USB CDC (ACM) Device that can be used as a USB <-> Ethernet bridge using the RNDIS protocol.
#include "RTE_Components.h"
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
#include "rl_usb.h"
#include "Driver_ETH.h"
#include "Driver_ETH_MAC.h"
#include "Driver_ETH_PHY.h"
#include "USBD_Config_CDC_n.h"
#define ETH_MAC_NUM 0
#define ETH_PHY_NUM 0
#define RNDIS_MAC_ADDR "1E-30-6C-A2-45-5E"
#define RNDIS_MCAST_NUM 16
#define RNDIS_VENDOR_DESC "Keil NIC (USB <-> ETH)"
#define RNDIS_VENDOR_ID 0xFFFFFF
extern ARM_DRIVER_ETH_MAC ARM_Driver_ETH_MAC_(ETH_MAC_NUM);
extern ARM_DRIVER_ETH_PHY ARM_Driver_ETH_PHY_(ETH_PHY_NUM);
static ARM_DRIVER_ETH_MAC *EthMac = &ARM_Driver_ETH_MAC_(ETH_MAC_NUM);
static ARM_DRIVER_ETH_PHY *EthPhy = &ARM_Driver_ETH_PHY_(ETH_PHY_NUM);
static void MAC_str_to_addr (const char *mac_str, uint8_t *mac_addr);
static void InitVars (void);
static void ResetVars (void);
static void EthMac_Notify (uint32_t event);
static uint32_t rndis_state;
static ARM_ETH_LINK_STATE link_state;
static ARM_ETH_LINK_INFO link_info;
static uint32_t link_speed;
static bool link_state_up;
static bool link_state_down;
static uint32_t packet_filter;
static ARM_ETH_MAC_ADDR mac_address;
static ARM_ETH_MAC_ADDR mcast_address[RNDIS_MCAST_NUM];
static uint32_t get_encapsulated_response_len;
static uint32_t get_encapsulated_response_buf[128/4];
static uint32_t xmit_ok;
static uint32_t rcv_ok;
static uint32_t xmit_error;
static uint32_t rcv_error;
static uint32_t rcv_no_buffer;
static uint32_t packet_in [(USBD_CDCn_ACM_SEND_BUF_SIZE +3)/4];
static uint32_t packet_out[(USBD_CDCn_ACM_RECEIVE_BUF_SIZE+3)/4];
#ifdef USB_CMSIS_RTOS2
static void ThreadConnection (void *arg);
static void ThreadDataIN (void *arg);
static void ThreadDataOUT (void *arg);
#ifdef USB_CMSIS_RTOS2_RTX5
static osRtxThread_t thread_cb_mem_connection __SECTION(.bss.os.thread.cb);
static uint64_t thread_stack_mem_connection[512/8] __SECTION(.bss.os.thread.stack);
static osRtxThread_t thread_cb_mem_data_in __SECTION(.bss.os.thread.cb);
static uint64_t thread_stack_mem_data_in [512/8] __SECTION(.bss.os.thread.stack);
static osRtxThread_t thread_cb_mem_data_out __SECTION(.bss.os.thread.cb);
static uint64_t thread_stack_mem_data_out [512/8] __SECTION(.bss.os.thread.stack);
#endif
static const osThreadAttr_t thread_attr_connection = {
"ThreadConnection",
0U,
#ifdef USB_CMSIS_RTOS2_RTX5
&thread_cb_mem_connection,
sizeof(osRtxThread_t),
&thread_stack_mem_connection[0],
#else
NULL,
0U,
NULL,
#endif
512U,
osPriorityNormal,
0U,
0U
};
static const osThreadAttr_t thread_attr_data_in = {
"ThreadDataIN",
0U,
#ifdef USB_CMSIS_RTOS2_RTX5
&thread_cb_mem_data_in,
sizeof(osRtxThread_t),
&thread_stack_mem_data_in[0],
#else
NULL,
0U,
NULL,
#endif
512U,
osPriorityNormal,
0U,
0U
};
static const osThreadAttr_t thread_attr_data_out = {
"ThreadDataOUT",
0U,
#ifdef USB_CMSIS_RTOS2_RTX5
&thread_cb_mem_data_out,
sizeof(osRtxThread_t),
&thread_stack_mem_data_out[0],
#else
NULL,
0U,
NULL,
#endif
512U,
osPriorityNormal,
0U,
0U
};
#else
static void ThreadConnection (void const *arg);
static void ThreadDataIN (void const *arg);
static void ThreadDataOUT (void const *arg);
extern const osThreadDef_t os_thread_def_ThreadConnection;
osThreadDef(ThreadConnection, osPriorityNormal, 1, NULL);
extern const osThreadDef_t os_thread_def_ThreadDataIN;
osThreadDef(ThreadDataIN, osPriorityNormal, 1, NULL);
extern const osThreadDef_t os_thread_def_ThreadDataOUT;
osThreadDef(ThreadDataOUT, osPriorityNormal, 1, NULL);
#endif
static void *thread_id_Connection;
static void *thread_id_DataIN;
static void *thread_id_DataOUT;
static void MAC_str_to_addr (const char *mac_str, uint8_t *mac_addr) {
uint8_t c;
uint8_t n;
uint32_t i, j;
uint32_t str_len;
str_len = strlen(mac_str);
j = 0U;
for (i = 0U; i < str_len; i++) {
c = (uint8_t)mac_str[i];
if (c == '-') {
continue;
} else if ((c >= '0') && (c <= '9')) {
n = c - '0';
} else if ((c >= 'A') && (c <= 'F')) {
n = c - ('A' + 10U);
} else if ((c >= 'a') && (c <= 'f')) {
n = c - ('a' + 10U);
} else {
n = 0U;
}
if ((j & 1U) != 0U) {
mac_addr[j>>1] |= n;
} else {
mac_addr[j>>1] = (uint8_t)((uint32_t)n << 4);
}
j++;
}
}
static void InitVars (void) {
rndis_state = RNDIS_UNINITIALIZED;
link_state = ARM_ETH_LINK_DOWN;
link_info.speed = 0U;
link_info.duplex = 0U;
link_speed = 0U;
packet_filter = 0U;
memset((void *)mcast_address, 0, sizeof(mcast_address));
ResetVars();
}
static void ResetVars (void) {
link_state_up = false;
link_state_down = false;
get_encapsulated_response_len = 0U;
xmit_ok = 0U;
rcv_ok = 0U;
xmit_error = 0U;
rcv_error = 0U;
rcv_no_buffer = 0U;
}
static bool ENET_Initialize (void) {
ARM_ETH_MAC_CAPABILITIES eth_capabilities;
packet_filter = ARM_ETH_MAC_ADDRESS_BROADCAST;
eth_capabilities = EthMac->GetCapabilities();
if (EthMac->Initialize(EthMac_Notify) != ARM_DRIVER_OK) { return false; }
if (EthMac->PowerControl(ARM_POWER_FULL) != ARM_DRIVER_OK) { return false; }
if (eth_capabilities.mac_address != 0U) {
if (EthMac->GetMacAddress(&mac_address) != ARM_DRIVER_OK) { return false; }
} else {
MAC_str_to_addr(RNDIS_MAC_ADDR, (uint8_t *)&mac_address);
if (EthMac->SetMacAddress(&mac_address) != ARM_DRIVER_OK) { return false; }
}
if (EthPhy->Initialize(EthMac->PHY_Read, EthMac->PHY_Write) != ARM_DRIVER_OK) { return false; }
if (EthPhy->PowerControl(ARM_POWER_FULL) != ARM_DRIVER_OK) { return false; }
if (EthPhy->SetInterface(eth_capabilities.media_interface) != ARM_DRIVER_OK) { return false; }
if (EthPhy->SetMode(ARM_ETH_PHY_AUTO_NEGOTIATE) != ARM_DRIVER_OK) { return false; }
#ifdef USB_CMSIS_RTOS2
thread_id_Connection = osThreadNew(ThreadConnection, NULL, &thread_attr_connection);
thread_id_DataIN = osThreadNew(ThreadDataIN, NULL, &thread_attr_data_in);
thread_id_DataOUT = osThreadNew(ThreadDataOUT, NULL, &thread_attr_data_out);
#else
thread_id_Connection = osThreadCreate(osThread(ThreadConnection), NULL);
thread_id_DataIN = osThreadCreate(osThread(ThreadDataIN), NULL);
thread_id_DataOUT = osThreadCreate(osThread(ThreadDataOUT), NULL);
#endif
#ifdef USB_CMSIS_RTOS2
(void)osThreadFlagsSet(thread_id_Connection, 1U);
#else
(void)osSignalSet(thread_id_Connection, 1U);
#endif
return true;
}
static void ENET_Uninitialize (void) {
packet_filter = ARM_ETH_MAC_ADDRESS_BROADCAST;
(void)EthMac->SetMacAddress(&mac_address);
(void)EthMac->SetAddressFilter(NULL, 0);
(void)EthMac->Control(ARM_ETH_MAC_CONFIGURE,
(uint32_t)(link_info.speed ) |
(uint32_t)(link_info.duplex << ARM_ETH_MAC_DUPLEX_Pos) |
packet_filter);
if (thread_id_Connection != NULL) { (void)osThreadTerminate(thread_id_Connection); thread_id_Connection = NULL; }
if (thread_id_DataIN != NULL) { (void)osThreadTerminate(thread_id_DataIN); thread_id_DataIN = NULL; }
if (thread_id_DataOUT != NULL) { (void)osThreadTerminate(thread_id_DataOUT); thread_id_DataOUT = NULL; }
(void)EthPhy->PowerControl(ARM_POWER_OFF);
(void)EthPhy->Uninitialize();
(void)EthMac->PowerControl(ARM_POWER_OFF);
(void)EthMac->Uninitialize();
}
InitVars();
}
InitVars();
ENET_Uninitialize();
}
InitVars();
}
const REMOTE_NDIS_INITIALIZE_MSG_t *ptr_init_msg;
REMOTE_NDIS_INITIALIZE_CMPLT_t *ptr_init_cmplt;
const REMOTE_NDIS_HALT_MSG_t *ptr_halt_msg;
const REMOTE_NDIS_QUERY_MSG_t *ptr_query_msg;
REMOTE_NDIS_QUERY_CMPLT_t *ptr_query_cmplt;
const REMOTE_NDIS_SET_MSG_t *ptr_set_msg;
REMOTE_NDIS_SET_CMPLT_t *ptr_set_cmplt;
const REMOTE_NDIS_RESET_MSG_t *ptr_reset_msg;
REMOTE_NDIS_RESET_CMPLT_t *ptr_reset_cmplt;
const REMOTE_NDIS_KEEPALIVE_MSG_t *ptr_keepalive_msg;
REMOTE_NDIS_KEEPALIVE_CMPLT_t *ptr_keepalive_cmplt;
uint32_t status, val;
uint32_t i;
uint32_t num, by;
uint16_t msg_type;
(void)len;
msg_type = __UNALIGNED_UINT16_READ(buf);
if ((rndis_state == RNDIS_UNINITIALIZED) &&
(msg_type != REMOTE_NDIS_INITIALIZE_MSG) &&
(msg_type != REMOTE_NDIS_HALT_MSG)) {
return false;
}
if (((uint32_t)buf & 3) != 0) {
return false;
}
status = RNDIS_STATUS_SUCCESS;
get_encapsulated_response_len = 0U;
switch (msg_type) {
case REMOTE_NDIS_INITIALIZE_MSG:
ptr_init_msg = (const REMOTE_NDIS_INITIALIZE_MSG_t *)((const void *)buf);
if (ptr_init_msg->MessageLength != sizeof(REMOTE_NDIS_INITIALIZE_MSG_t)) { return false; }
if (ptr_init_msg->MajorVersion != RNDIS_MAJOR_VERSION) { return false; }
if (ptr_init_msg->MinorVersion != RNDIS_MINOR_VERSION) { return false; }
if (ptr_init_msg->MaxTransferSize != 16384U) { return false; }
(void)ENET_Initialize ();
rndis_state = RNDIS_INITIALIZED;
ptr_init_cmplt = (REMOTE_NDIS_INITIALIZE_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_init_cmplt->MessageType = REMOTE_NDIS_INITIALIZE_CMPLT;
ptr_init_cmplt->MessageLength = sizeof(REMOTE_NDIS_INITIALIZE_CMPLT_t);
ptr_init_cmplt->RequestID = ptr_init_msg->RequestID;
ptr_init_cmplt->Status = status;
ptr_init_cmplt->MajorVersion = RNDIS_MAJOR_VERSION;
ptr_init_cmplt->MinorVersion = RNDIS_MINOR_VERSION;
ptr_init_cmplt->DeviceFlags = RNDIS_DF_CONNECTIONLESS;
ptr_init_cmplt->Medium = (uint32_t)NdisMedium802_3;
ptr_init_cmplt->MaxPacketsPerTransfer = 1U;
ptr_init_cmplt->MaxTransferSize = USBD_CDCn_ACM_RECEIVE_BUF_SIZE;
ptr_init_cmplt->PacketAlignmentFactor = 2U;
ptr_init_cmplt->Reserved[0] = 0U;
ptr_init_cmplt->Reserved[1] = 0U;
get_encapsulated_response_len = ptr_init_cmplt->MessageLength;
break;
case REMOTE_NDIS_HALT_MSG:
ptr_halt_msg = (const REMOTE_NDIS_HALT_MSG_t *)((const void *)buf);
if (ptr_halt_msg->MessageLength != sizeof(REMOTE_NDIS_HALT_MSG_t)) { return false; }
(void)ENET_Uninitialize ();
rndis_state = RNDIS_UNINITIALIZED;
return true;
case REMOTE_NDIS_QUERY_MSG:
ptr_query_msg = (const REMOTE_NDIS_QUERY_MSG_t *)((const void *)buf);
if (ptr_query_msg->MessageLength < 28U) { return false; }
ptr_query_cmplt = (REMOTE_NDIS_QUERY_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_query_cmplt->MessageType = REMOTE_NDIS_QUERY_CMPLT;
ptr_query_cmplt->RequestID = ptr_query_msg->RequestID;
ptr_query_cmplt->InformationBufferOffset = 16U;
switch (ptr_query_msg->Oid) {
case OID_GEN_SUPPORTED_LIST:
ptr_query_cmplt->InformationBufferLength = 23U * 4U;
ptr_query_cmplt->OIDInputBuffer[0] = OID_GEN_SUPPORTED_LIST;
ptr_query_cmplt->OIDInputBuffer[1] = OID_GEN_HARDWARE_STATUS;
ptr_query_cmplt->OIDInputBuffer[2] = OID_GEN_MEDIA_SUPPORTED;
ptr_query_cmplt->OIDInputBuffer[3] = OID_GEN_MEDIA_IN_USE;
ptr_query_cmplt->OIDInputBuffer[4] = OID_GEN_MAXIMUM_FRAME_SIZE;
ptr_query_cmplt->OIDInputBuffer[5] = OID_GEN_LINK_SPEED;
ptr_query_cmplt->OIDInputBuffer[6] = OID_GEN_TRANSMIT_BLOCK_SIZE;
ptr_query_cmplt->OIDInputBuffer[7] = OID_GEN_RECEIVE_BLOCK_SIZE;
ptr_query_cmplt->OIDInputBuffer[8] = OID_GEN_VENDOR_ID;
ptr_query_cmplt->OIDInputBuffer[9] = OID_GEN_VENDOR_DESCRIPTION;
ptr_query_cmplt->OIDInputBuffer[10] = OID_GEN_CURRENT_PACKET_FILTER;
ptr_query_cmplt->OIDInputBuffer[11] = OID_GEN_MAXIMUM_TOTAL_SIZE;
ptr_query_cmplt->OIDInputBuffer[12] = OID_GEN_MEDIA_CONNECT_STATUS;
ptr_query_cmplt->OIDInputBuffer[13] = OID_GEN_PHYSICAL_MEDIUM;
ptr_query_cmplt->OIDInputBuffer[14] = OID_GEN_XMIT_OK;
ptr_query_cmplt->OIDInputBuffer[15] = OID_GEN_RCV_OK;
ptr_query_cmplt->OIDInputBuffer[16] = OID_GEN_XMIT_ERROR;
ptr_query_cmplt->OIDInputBuffer[17] = OID_GEN_RCV_ERROR;
ptr_query_cmplt->OIDInputBuffer[18] = OID_GEN_RCV_NO_BUFFER;
ptr_query_cmplt->OIDInputBuffer[19] = OID_802_3_PERMANENT_ADDRESS;
ptr_query_cmplt->OIDInputBuffer[20] = OID_802_3_CURRENT_ADDRESS;
ptr_query_cmplt->OIDInputBuffer[21] = OID_802_3_MULTICAST_LIST;
ptr_query_cmplt->OIDInputBuffer[22] = OID_802_3_MAXIMUM_LIST_SIZE;
break;
case OID_GEN_HARDWARE_STATUS:
ptr_query_cmplt->InformationBufferLength = 4U;
if (link_state == ARM_ETH_LINK_UP) {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisHardwareStatusReady;
} else {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisHardwareStatusNotReady;
}
break;
case OID_GEN_MEDIA_SUPPORTED:
case OID_GEN_MEDIA_IN_USE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisMedium802_3;
break;
case OID_GEN_MAXIMUM_FRAME_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = ETH_MTU_SIZE;
break;
case OID_GEN_LINK_SPEED:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = link_speed / 100U;
break;
case OID_GEN_TRANSMIT_BLOCK_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = USBD_CDCn_ACM_SEND_BUF_SIZE;
break;
case OID_GEN_RECEIVE_BLOCK_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = USBD_CDCn_ACM_RECEIVE_BUF_SIZE;
break;
case OID_GEN_VENDOR_ID:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = RNDIS_VENDOR_ID;
break;
case OID_GEN_VENDOR_DESCRIPTION:
ptr_query_cmplt->InformationBufferLength = strlen(RNDIS_VENDOR_DESC) + 1;
memset((void *)&ptr_query_cmplt->OIDInputBuffer[0], 0, ptr_query_cmplt->InformationBufferLength + 1U);
memcpy((void *)&ptr_query_cmplt->OIDInputBuffer[0], RNDIS_VENDOR_DESC, strlen(RNDIS_VENDOR_DESC));
break;
case OID_GEN_CURRENT_PACKET_FILTER:
ptr_query_cmplt->InformationBufferLength = 4U;
val = 0U;
if ((packet_filter & ARM_ETH_MAC_ADDRESS_MULTICAST) != 0U) { val |= RNDIS_FILTER_ALL_MULTICAST; }
if ((packet_filter & ARM_ETH_MAC_ADDRESS_BROADCAST) != 0U) { val |= RNDIS_FILTER_BROADCAST; }
if ((packet_filter & ARM_ETH_MAC_ADDRESS_ALL) != 0U) { val |= RNDIS_FILTER_PROMISCUOUS; }
ptr_query_cmplt->OIDInputBuffer[0] = val;
break;
case OID_GEN_MAXIMUM_TOTAL_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = 44U + ETH_MAX_SIZE;
break;
case OID_GEN_MEDIA_CONNECT_STATUS:
ptr_query_cmplt->InformationBufferLength = 4U;
if (link_state == ARM_ETH_LINK_UP) {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisMediaStateConnected;
} else {
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisMediaStateDisconnected;
}
break;
case OID_GEN_PHYSICAL_MEDIUM:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = (uint32_t)NdisPhysicalMediumUnspecified;
break;
case OID_GEN_XMIT_OK:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = xmit_ok;
break;
case OID_GEN_RCV_OK:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = rcv_ok;
break;
case OID_GEN_XMIT_ERROR:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = xmit_error;
break;
case OID_GEN_RCV_ERROR:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = rcv_error;
break;
case OID_GEN_RCV_NO_BUFFER:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = rcv_no_buffer;
break;
case OID_802_3_PERMANENT_ADDRESS:
case OID_802_3_CURRENT_ADDRESS:
ptr_query_cmplt->InformationBufferLength = 6U;
memcpy((void *)&ptr_query_cmplt->OIDInputBuffer[0], &mac_address, sizeof(ARM_ETH_MAC_ADDR));
break;
case OID_802_3_MULTICAST_LIST:
for (i = 0U; i < RNDIS_MCAST_NUM; i++) {
if ((__UNALIGNED_UINT32_READ(&mcast_address[0]) == 0U) &&
(__UNALIGNED_UINT16_READ(&mcast_address[4]) == 0U)) {
break;
}
}
if (i == 0U) {
num = 0U;
ptr_query_cmplt->InformationBufferOffset = 0U;
} else {
num = i;
if (i < RNDIS_MCAST_NUM) {
num = i + 1U;
} else {
num = i;
}
memcpy((void *)&ptr_query_cmplt->OIDInputBuffer[0], mcast_address, num * sizeof(ARM_ETH_MAC_ADDR));
}
ptr_query_cmplt->InformationBufferLength = num * sizeof(ARM_ETH_MAC_ADDR);
break;
case OID_802_3_MAXIMUM_LIST_SIZE:
ptr_query_cmplt->InformationBufferLength = 4U;
ptr_query_cmplt->OIDInputBuffer[0] = RNDIS_MCAST_NUM;
break;
default:
ptr_query_cmplt->InformationBufferOffset = 0U;
ptr_query_cmplt->InformationBufferLength = 0U;
status = RNDIS_STATUS_NOT_SUPPORTED;
break;
}
ptr_query_cmplt->Status = status;
ptr_query_cmplt->MessageLength = ptr_query_cmplt->InformationBufferLength + 24U;
get_encapsulated_response_len = ptr_query_cmplt->MessageLength;
break;
case REMOTE_NDIS_SET_MSG:
ptr_set_msg = (const REMOTE_NDIS_SET_MSG_t *)((const void *)buf);
if (ptr_set_msg->MessageLength < 28U) { return false; }
ptr_set_cmplt = (REMOTE_NDIS_SET_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_set_cmplt->MessageType = REMOTE_NDIS_SET_CMPLT;
ptr_set_cmplt->MessageLength = sizeof(REMOTE_NDIS_SET_CMPLT_t);
ptr_set_cmplt->RequestID = ptr_set_msg->RequestID;
switch (ptr_set_msg->Oid) {
case OID_802_3_MULTICAST_LIST:
by = ptr_set_msg->InformationBufferLength;
if (by > (sizeof(ARM_ETH_MAC_ADDR) * RNDIS_MCAST_NUM)) {
by = sizeof(ARM_ETH_MAC_ADDR) * RNDIS_MCAST_NUM;
}
if (by > 0U) {
memcpy(mcast_address, (const void *)&ptr_set_msg->OIDInputBuffer[0], by);
num = by / sizeof(ARM_ETH_MAC_ADDR);
if (EthMac->SetAddressFilter(mcast_address, num) != ARM_DRIVER_OK) {
status = RNDIS_STATUS_FAILURE;
}
}
break;
case OID_GEN_CURRENT_PACKET_FILTER:
if ((ptr_set_msg->InformationBufferLength == 4U) &&
(ptr_set_msg->InformationBufferOffset != 0U)) {
val = __UNALIGNED_UINT32_READ(((const uint8_t *)&ptr_set_msg->RequestID) + ptr_set_msg->InformationBufferOffset);
if (val != 0U) {
if ((val & RNDIS_FILTER_ALL_MULTICAST) != 0U) { packet_filter |= ARM_ETH_MAC_ADDRESS_MULTICAST; }
if ((val & RNDIS_FILTER_BROADCAST) != 0U) { packet_filter |= ARM_ETH_MAC_ADDRESS_BROADCAST; }
if ((val & RNDIS_FILTER_PROMISCUOUS) != 0U) { packet_filter |= ARM_ETH_MAC_ADDRESS_ALL; }
(void)EthMac->Control(ARM_ETH_MAC_CONFIGURE,
(uint32_t)(link_info.speed ) |
(uint32_t)(link_info.duplex << ARM_ETH_MAC_DUPLEX_Pos) |
packet_filter);
rndis_state = RNDIS_DATA_INITIALIZED;
} else {
if (rndis_state == RNDIS_DATA_INITIALIZED) {
rndis_state = RNDIS_INITIALIZED;
}
}
} else {
status = RNDIS_STATUS_FAILURE;
}
break;
default:
status = RNDIS_STATUS_NOT_SUPPORTED;
break;
}
ptr_set_cmplt->Status = status;
get_encapsulated_response_len = ptr_set_cmplt->MessageLength;
break;
case REMOTE_NDIS_RESET_MSG:
ptr_reset_msg = (const REMOTE_NDIS_RESET_MSG_t *)((const void *)buf);
if (ptr_reset_msg->MessageLength != sizeof(REMOTE_NDIS_RESET_MSG_t)) { return false; }
ResetVars();
#ifdef USB_CMSIS_RTOS2
(void)osThreadFlagsSet(thread_id_DataIN, 1U);
(void)osThreadFlagsSet(thread_id_DataOUT, 1U);
#else
(void)osSignalSet(thread_id_DataIN, 1U);
(void)osSignalSet(thread_id_DataOUT, 1U);
#endif
ptr_reset_cmplt = (REMOTE_NDIS_RESET_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_reset_cmplt->MessageType = REMOTE_NDIS_RESET_CMPLT;
ptr_reset_cmplt->MessageLength = sizeof(REMOTE_NDIS_RESET_CMPLT_t);
ptr_reset_cmplt->Status = status;
ptr_reset_cmplt->AddressingReset = 0U;
get_encapsulated_response_len = ptr_reset_cmplt->MessageLength;
break;
case REMOTE_NDIS_KEEPALIVE_MSG:
ptr_keepalive_msg = (const REMOTE_NDIS_KEEPALIVE_MSG_t *)((const void *)buf);
if (ptr_keepalive_msg->MessageLength != sizeof(REMOTE_NDIS_KEEPALIVE_MSG_t)) { return false; }
ptr_keepalive_cmplt = (REMOTE_NDIS_KEEPALIVE_CMPLT_t *)((void *)get_encapsulated_response_buf);
ptr_keepalive_cmplt->MessageType = REMOTE_NDIS_KEEPALIVE_CMPLT;
ptr_keepalive_cmplt->MessageLength = sizeof(REMOTE_NDIS_KEEPALIVE_CMPLT_t);
ptr_keepalive_cmplt->RequestID = ptr_keepalive_msg->RequestID;
ptr_keepalive_cmplt->Status = status;
get_encapsulated_response_len = ptr_keepalive_cmplt->MessageLength;
break;
default:
return false;
}
if (get_encapsulated_response_len != 0U) {
}
return true;
}
REMOTE_NDIS_INDICATE_STATUS_MSG_t *ptr_indicate_status_msg;
uint32_t status;
(void)max_len;
if (link_state_up || link_state_down) {
if (link_state_up) {
status = RNDIS_STATUS_MEDIA_CONNECT;
} else {
status = RNDIS_STATUS_MEDIA_DISCONNECT;
}
ptr_indicate_status_msg = (REMOTE_NDIS_INDICATE_STATUS_MSG_t *)((void *)get_encapsulated_response_buf);
ptr_indicate_status_msg->MessageType = REMOTE_NDIS_INDICATE_STATUS_MSG;
ptr_indicate_status_msg->MessageLength = 20U;
ptr_indicate_status_msg->Status = status;
ptr_indicate_status_msg->StatusBufferLength = 0U;
ptr_indicate_status_msg->StatusBufferOffset = 0U;
get_encapsulated_response_len = 20U;
link_state_up = false;
link_state_down = false;
}
if (get_encapsulated_response_len != 0U) {
*buf = (uint8_t *)get_encapsulated_response_buf;
*len = (uint16_t) get_encapsulated_response_len;
get_encapsulated_response_len = 0U;
}
return true;
}
}
(void)len;
#ifdef USB_CMSIS_RTOS2
(void)osThreadFlagsSet(thread_id_DataOUT, 1U);
#else
(void)osSignalSet(thread_id_DataOUT, 1U);
#endif
}
static void EthMac_Notify (uint32_t event) {
switch (event) {
case ARM_ETH_MAC_EVENT_RX_FRAME:
#ifdef USB_CMSIS_RTOS2
(void)osThreadFlagsSet(thread_id_DataIN, 1U);
#else
(void)osSignalSet(thread_id_DataIN, 1U);
#endif
break;
default:
break;
}
}
#ifdef USB_CMSIS_RTOS2
__NO_RETURN static void ThreadConnection (void *arg) {
#else
__NO_RETURN static void ThreadConnection (void const *arg) {
#endif
ARM_ETH_LINK_STATE link_state_local;
uint32_t speed_local;
(void)(arg);
for (;;) {
#ifdef USB_CMSIS_RTOS2
(void)osThreadFlagsWait(1U, osFlagsWaitAll, 500U);
#else
(void)osSignalWait(1U, 500U);
#endif
link_state_local = EthPhy->GetLinkState();
if (link_state_local == ARM_ETH_LINK_UP) {
link_info = EthPhy->GetLinkInfo();
switch (link_info.speed) {
case 0: speed_local = 10000000U; break;
case 1: speed_local = 100000000U; break;
case 2: speed_local = 1000000000U; break;
default: speed_local = 0U;
}
} else {
speed_local = 0U;
}
if (link_speed != speed_local) {
link_speed = speed_local;
}
if (link_state != link_state_local) {
link_state = link_state_local;
if (link_state == ARM_ETH_LINK_UP) {
(void)EthMac->Control(ARM_ETH_MAC_CONFIGURE,
(uint32_t)(link_info.speed ) |
(uint32_t)(link_info.duplex << ARM_ETH_MAC_DUPLEX_Pos) |
packet_filter);
(void)EthMac->Control(ARM_ETH_MAC_CONTROL_TX, 1U);
(void)EthMac->Control(ARM_ETH_MAC_CONTROL_RX, 1U);
link_state_down = false;
link_state_up = true;
} else {
(void)EthMac->Control(ARM_ETH_MAC_FLUSH,
ARM_ETH_MAC_FLUSH_TX |
ARM_ETH_MAC_FLUSH_RX);
(void)EthMac->Control(ARM_ETH_MAC_CONTROL_TX, 0U);
(void)EthMac->Control(ARM_ETH_MAC_CONTROL_RX, 0U);
link_state_up = false;
link_state_down = true;
}
}
}
}
#ifdef USB_CMSIS_RTOS2
__NO_RETURN static void ThreadDataIN (void *arg) {
#else
__NO_RETURN static void ThreadDataIN (void const *arg) {
#endif
REMOTE_NDIS_PACKET_MSG_t *ptr_packet_msg;
uint32_t eth_rx_size;
int32_t usb_cdc_acm_status;
(void)(arg);
ptr_packet_msg = (REMOTE_NDIS_PACKET_MSG_t *)((void *)packet_in);
for (;;) {
#ifdef USB_CMSIS_RTOS2
(void)osThreadFlagsWait(1U, osFlagsWaitAll, osWaitForever);
#else
(void)osSignalWait(1U, osWaitForever);
#endif
for (;;) {
eth_rx_size = EthMac->GetRxFrameSize();
if (eth_rx_size == 0) {
break;
}
if ((link_state == ARM_ETH_LINK_UP) &&
(rndis_state == RNDIS_DATA_INITIALIZED) &&
(eth_rx_size >= ETH_MIN_SIZE) &&
(eth_rx_size <= ETH_MAX_SIZE)) {
(void)EthMac->ReadFrame((uint8_t *)&ptr_packet_msg->PayLoad[0], eth_rx_size);
ptr_packet_msg->MessageType = REMOTE_NDIS_PACKET_MSG;
ptr_packet_msg->MessageLength = eth_rx_size + 44U;
ptr_packet_msg->DataOffset = 36U;
ptr_packet_msg->DataLength = eth_rx_size;
ptr_packet_msg->OutOfBandDataOffset = 0U;
ptr_packet_msg->OutOfBandDataLength = 0U;
ptr_packet_msg->NumOutOfBandDataElements = 0U;
ptr_packet_msg->PerPacketInfoOffset = 0U;
ptr_packet_msg->PerPacketInfoLength = 0U;
ptr_packet_msg->Reserved[0] = 0U;
ptr_packet_msg->Reserved[1] = 0U;
do {
usb_cdc_acm_status =
USBD_CDC_ACM_WriteData (n, (
const uint8_t *)ptr_packet_msg, (int32_t)ptr_packet_msg->MessageLength);
} while (usb_cdc_acm_status == 0);
if (usb_cdc_acm_status == (int32_t)ptr_packet_msg->MessageLength) {
rcv_ok++;
} else {
rcv_error++;
}
} else {
(void)EthMac->ReadFrame(NULL, 0);
}
}
}
}
#ifdef USB_CMSIS_RTOS2
__NO_RETURN static void ThreadDataOUT (void *arg) {
#else
__NO_RETURN static void ThreadDataOUT (void const *arg) {
#endif
REMOTE_NDIS_PACKET_MSG_t *ptr_packet_msg;
uint32_t eth_tx_size;
int32_t usb_cdc_acm_status, eth_mac_status;
(void)(arg);
eth_tx_size = 0U;
ptr_packet_msg = (REMOTE_NDIS_PACKET_MSG_t *)((void *)packet_out);
for (;;) {
#ifdef USB_CMSIS_RTOS2
(void)osThreadFlagsWait(1U, osFlagsWaitAll, osWaitForever);
#else
(void)osSignalWait(1U, osWaitForever);
#endif
for (;;) {
usb_cdc_acm_status =
USBD_CDC_ACM_ReadData (n, (uint8_t *)ptr_packet_msg, USBD_CDC0_ACM_RECEIVE_BUF_SIZE);
if (usb_cdc_acm_status == 0) {
break;
} else if (usb_cdc_acm_status > (int32_t)ptr_packet_msg->DataLength) {
eth_tx_size = ptr_packet_msg->DataLength;
}
if ((link_state == ARM_ETH_LINK_UP) &&
(rndis_state == RNDIS_DATA_INITIALIZED) &&
(eth_tx_size >= ETH_MIN_SIZE) &&
(eth_tx_size <= ETH_MAX_SIZE)) {
do {
eth_mac_status = EthMac->SendFrame((uint8_t *)&ptr_packet_msg->PayLoad[0], (uint32_t)(eth_tx_size), 0U);
} while (eth_mac_status == ARM_DRIVER_ERROR_BUSY);
if (eth_mac_status == ARM_DRIVER_OK) {
xmit_ok++;
} else {
xmit_error++;
}
}
}
}
}