|
||
| Products Download Events Support Videos | ||

Technical Support
On-Line Manuals
µVision3 User's Guide
Dialog Pages
Peripheral Dialog for CAN
The µVision3 Debugger offers a CAN dialog that allows you to review the actual settings of the CAN interface. This dialog opens via the main menu under Peripherals — CAN. This dialogs offers several tabs that are described in the following.
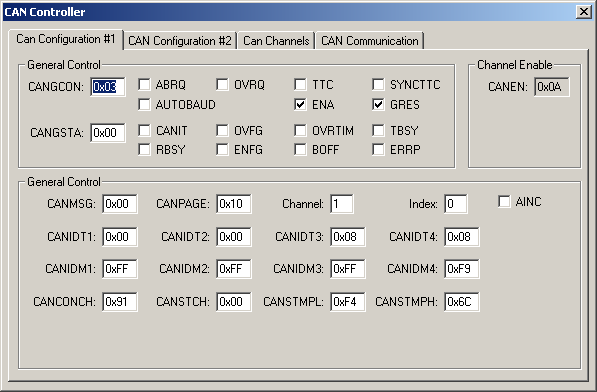
CAN Configuration (depends on the device): Allows you to review and modify the general CAN controller registers like Message ID Mask, CAN Baudrate and more.
Note
-
The µVision3 Debugger is not able to simulate directly CAN communication errors. CAN communication errors are handled by the CAN controller hardware. The user application does not care since they are automatically handled by the CAN controller. If it is required to simulate error conditions, the user might set the error status information in the CAN Configuration dialog pages.
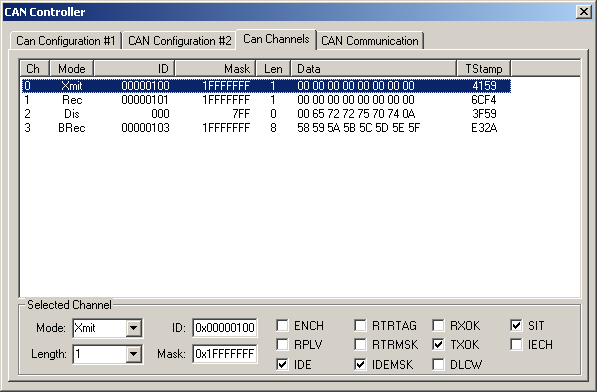
CAN Channels (depends on the device): Allows you to review the CAN message object registers including status information.
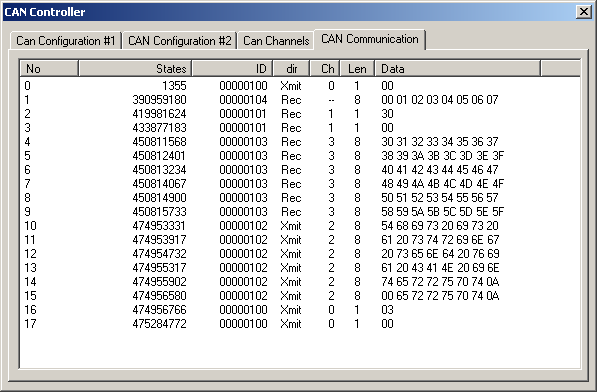
CAN Communication: Allows you to review incoming and outgoing messages. This window works similar to a CAN analyzer and shows messages on the simulated CAN BUS. The information includes:
-
No or Number: is a sequential number of the CAN message.
-
States: is the time stamp of the CAN message in CPU states.
-
ID: is the CAN message identifier used for transmission or receiving
-
Dir: is the direction of the CAN message: Xmit for transmit output of the CAN controller, Rec for receive incoming messages.
-
Ch or MO: channel or message object number (depends on the device).
-
Len or Length: number of bytes in the CAN message.
-
Data: the CAN message data bytes.
Note
- A double click in the CAN Communication Dialog clears the window.
ProductsDevelopment Tools |
Hardware & Collateral |
Downloads |
Support |
Contact |