 |
USB Component
Version 6.17.0
MDK Middleware for USB Device and Host Communication
|
|
USB Component
Version 6.17.0
MDK Middleware for USB Device and Host Communication
|
The Ethernet-over-USB example connects a computer via USB to a Cortex-M system that provides an Ethernet interface for network connectivity. The Linux Kernel provides native support for the CDC (NCM) USB Device class. This example shows how to connect a Ubuntu system via USB to an MCBSTM32F400 development board.
The following picture shows an exemplary connection of the development board (in this case a MCBSTM32F400) to a host PC.

In this example, we are using the MCBSTM32F400 board with the STM32F407IGHx device. Create a new project in MDK (Select Device STMicroelectronics:STM32F4 Series: STM32F407:STM32F407IG:STM32F407IGHx). In the Manage Run-Time Environment window, select the following components:
Click the Resolve button and then OK.
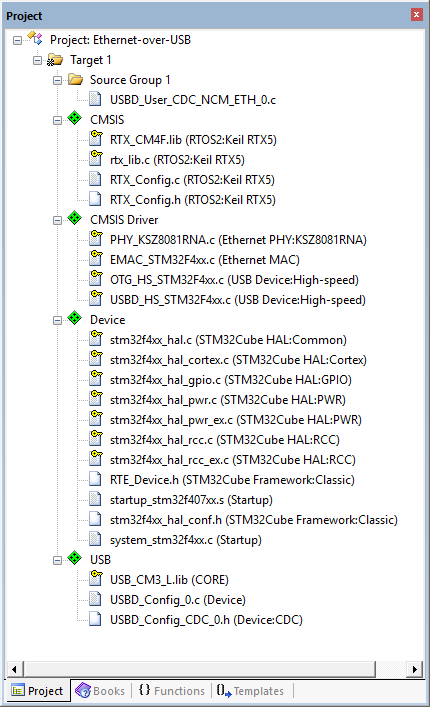
Before continuing to add the required source code, you need to add a template file called USBD_User_CDC_NCM_ETH_0.c:
Your Project should look like this:
/** ****************************************************************************** * @file Templates/Inc/main.h * @author MCD Application Team * @brief Header for main.c module ****************************************************************************** * @attention * * <h2><center>© COPYRIGHT(c) 2017-2018 STMicroelectronics</center></h2> * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Define to prevent recursive inclusion -------------------------------------*/ #ifndef __MAIN_H #define __MAIN_H /* Includes ------------------------------------------------------------------*/ #include "stm32f4xx_hal.h" #include "cmsis_os2.h" // ::CMSIS:RTOS2 /* Exported types ------------------------------------------------------------*/ /* Exported constants --------------------------------------------------------*/ extern uint64_t app_main_stk[]; extern const osThreadAttr_t app_main_attr; /* Exported macro ------------------------------------------------------------*/ /* Exported functions ------------------------------------------------------- */ extern void app_main (void *arg); #endif /* __MAIN_H */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/**
******************************************************************************
* @file Templates/Src/main.c
* @author MCD Application Team
* @brief Main program body
*
* @note modified by ARM
* The modifications allow to use this file as User Code Template
* within the Device Family Pack.
******************************************************************************
* @attention
*
* <h2><center>© COPYRIGHT(c) 2017-2018 STMicroelectronics</center></h2>
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#ifdef _RTE_
#include "RTE_Components.h" // Component selection
#endif
#ifdef RTE_CMSIS_RTOS2 // when RTE component CMSIS RTOS2 is used
#include "cmsis_os2.h" // ::CMSIS:RTOS2
#endif
#ifdef RTE_CMSIS_RTOS2_RTX5
/**
* Override default HAL_GetTick function
*/
uint32_t HAL_GetTick (void) {
static uint32_t ticks = 0U;
uint32_t i;
if (osKernelGetState () == osKernelRunning) {
return ((uint32_t)osKernelGetTickCount ());
}
/* If Kernel is not running wait approximately 1 ms then increment
and return auxiliary tick counter value */
for (i = (SystemCoreClock >> 14U); i > 0U; i--) {
__NOP(); __NOP(); __NOP(); __NOP(); __NOP(); __NOP();
__NOP(); __NOP(); __NOP(); __NOP(); __NOP(); __NOP();
}
return ++ticks;
}
#endif
/** @addtogroup STM32F4xx_HAL_Examples
* @{
*/
/** @addtogroup Templates
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
static void SystemClock_Config(void);
static void Error_Handler(void);
/* Private functions ---------------------------------------------------------*/
/**
* @brief Main program
* @param None
* @retval None
*/
int main(void)
{
/* STM32F4xx HAL library initialization:
- Configure the Flash prefetch, Flash preread and Buffer caches
- Systick timer is configured by default as source of time base, but user
can eventually implement his proper time base source (a general purpose
timer for example or other time source), keeping in mind that Time base
duration should be kept 1ms since PPP_TIMEOUT_VALUEs are defined and
handled in milliseconds basis.
- Low Level Initialization
*/
HAL_Init();
/* Configure the system clock to 168 MHz */
SystemClock_Config();
SystemCoreClockUpdate();
/* Add your application code here
*/
#ifdef RTE_CMSIS_RTOS2
/* Initialize CMSIS-RTOS2 */
osKernelInitialize ();
/* Create application main thread */
osThreadNew(app_main, NULL, &app_main_attr);
/* Start thread execution */
osKernelStart();
#endif
/* Infinite loop */
while (1)
{
}
}
/**
* @brief System Clock Configuration
* The system Clock is configured as follow :
* System Clock source = PLL (HSE)
* SYSCLK(Hz) = 168000000
* HCLK(Hz) = 168000000
* AHB Prescaler = 1
* APB1 Prescaler = 4
* APB2 Prescaler = 2
* HSE Frequency(Hz) = 8000000
* PLL_M = 25
* PLL_N = 336
* PLL_P = 2
* PLL_Q = 7
* VDD(V) = 3.3
* Main regulator output voltage = Scale1 mode
* Flash Latency(WS) = 5
* @param None
* @retval None
*/
static void SystemClock_Config(void)
{
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_OscInitTypeDef RCC_OscInitStruct;
/* Enable Power Control clock */
__HAL_RCC_PWR_CLK_ENABLE();
/* The voltage scaling allows optimizing the power consumption when the device is
clocked below the maximum system frequency, to update the voltage scaling value
regarding system frequency refer to product datasheet. */
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/* Enable HSE Oscillator and activate PLL with HSE as source */
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
/* Initialization Error */
Error_Handler();
}
/* Select PLL as system clock source and configure the HCLK, PCLK1 and PCLK2
clocks dividers */
RCC_ClkInitStruct.ClockType = (RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2);
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
/* Initialization Error */
Error_Handler();
}
/* STM32F405x/407x/415x/417x Revision Z devices: prefetch is supported */
if (HAL_GetREVID() == 0x1001)
{
/* Enable the Flash prefetch */
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
}
}
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
static void Error_Handler(void)
{
/* User may add here some code to deal with this error */
while(1)
{
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
#include "main.h"
#include "rl_usb.h"
// Main stack size must be multiple of 8 Bytes
#define APP_MAIN_STK_SZ (1024U)
uint64_t app_main_stk[APP_MAIN_STK_SZ / 8];
const osThreadAttr_t app_main_attr = {
.stack_mem = &app_main_stk[0],
.stack_size = sizeof(app_main_stk)
};
/*------------------------------------------------------------------------------
* Application
*----------------------------------------------------------------------------*/
__NO_RETURN void app_main (void *arg) {
(void)arg;
USBD_Initialize (0); /* USB Device 0 Initialization */
USBD_Connect (0); /* USB Device 0 Connect */
while (1) {
osThreadFlagsWait (0, osFlagsWaitAny, osWaitForever);
}
}
Before building the project, you need to edit these configuration files (in Configuration Wizard view):
Before building and downloading the project to the target, make sure that the correct debugger is set in the Options for Target dialog (ALT + F7). You may then build and download the example project to the evaluation board using the µVision commands:
After these steps, the project should start executing on your evaluation kit. In case of errors, refer to the Evaluation Board User's Guide for configuration information.
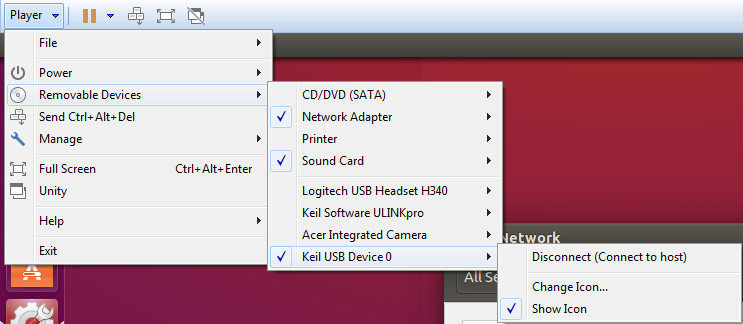
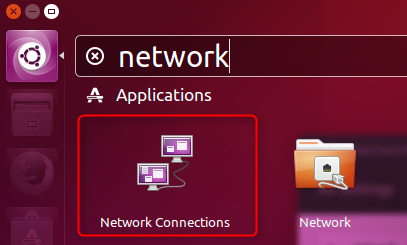
Especially when working with virtual machines, the USB connection is not passed onto the guest system properly. Then it can help to restart the guest. Also, to make Ubuntu use the network adapter that you like, do the following: In Ubuntu's search, enter "network". The Network Connections program will be available in the search results:
Double-click to open and then mark the Wired connection 1 and click Edit:
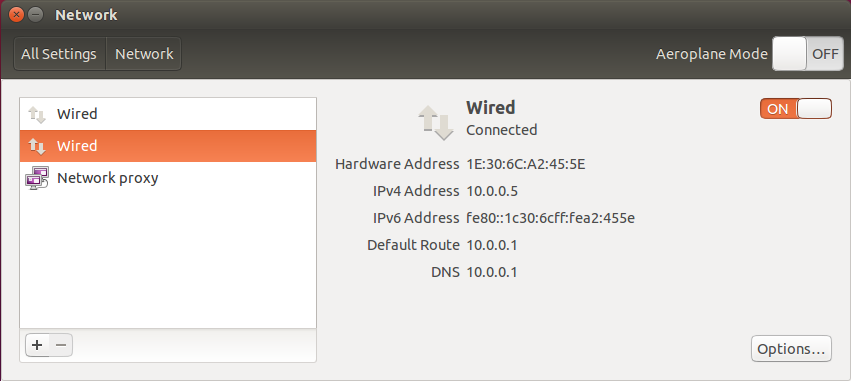
Select the MAC address of your Ethernet-over-USB device and press Save and Close:
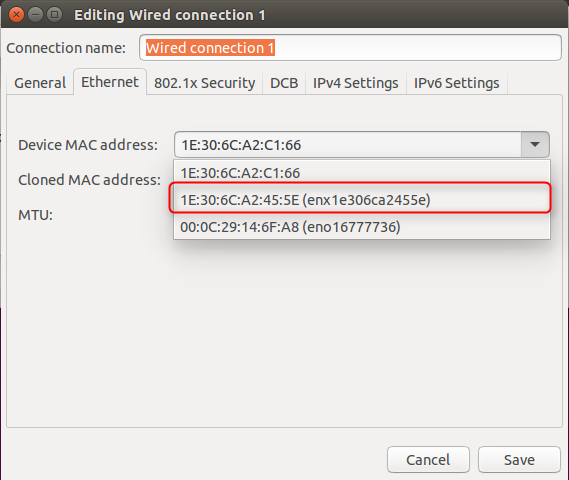
This should instruct Ubuntu to use your device for the network connection. Also, try to disconnect any other network adapter from the virtual machine.

